

������Q��ɽ�|���������b������˾
ϵ�ˣ�������������
ϵ�֙C��
�̶��Ԓ��
��I�]�䣺2419499708@qq.com
ϵ��ַ��ɽ�|ʡ���f���������G�ӽֵ���̩·888̖���Ę�401̖
�]����
ϵ�ҕr��Ո�f���ھ��|�W�Ͽ����ģ��x�x��
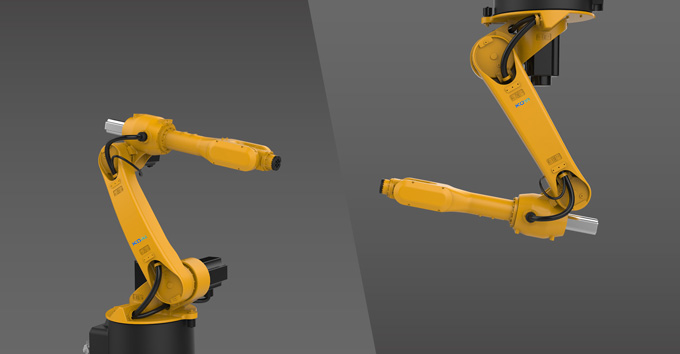
ɽ�|���������YӍ�����S�C�����ֱ��OӋҪ�����S�C�����ֱ۲����ǙCе�ֵ���Ҫ�ճֲ���������������֧�����ֲ������������ߣ������������������g�\�ӡ��ֱ��\�ӑ�ԓ����3���\�ӣ���s�����D���������������ֱ۵���s�\�ӣ��ֱ۵Ļ��D�������\���O���ڙC��̎��
һ�����S�C�����ֱ��OӋҪ��
1���۲������d�������Ⱥá������p
��1������������r�������x������Π��݆���ߴ硣
��2�����֧�΄��Ⱥͺ����x��֧���c�ľ��x��
��3������������������λ�úͷ���
��4��ע�⺆���Y����
��5�������Ͼ��ȡ�
2���۲��\���ٶ�Ҫ�ߣ��T��ҪС
�Cе���ֲ����\���ٶ��ǙCе�ֵ���Ҫ����֮һ������ӳ�Cе�ֵ����aˮƽ�����ڸ��ٶ��\�ӵęCе�֣����Ƅ��ٶ��OӋ��,���D���ٶ��OӋ�ڃȣ���ƽ���Ƅ��ٶȞ飬ƽ�����D���ٶ��ڡ����ٶȺͻ��D���ٶȵ���r�£��pС���������ǜpС�T�Ե���Ч��ֱ�ӵ��k������ˣ����S�C���˱�Ҫ�M���ܵ��p���p�ّT�����w��3��;����
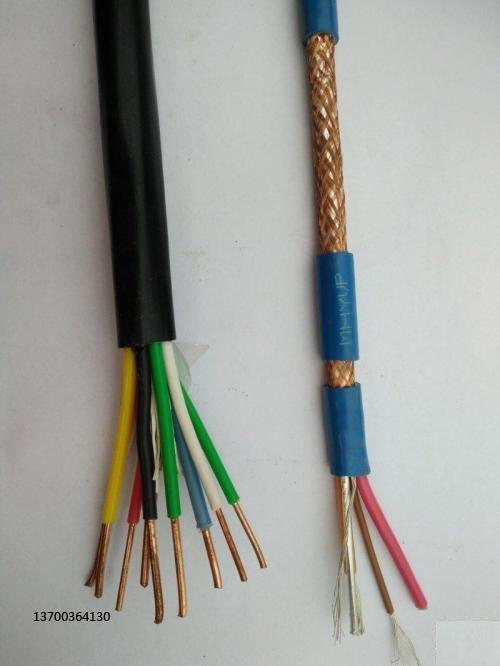
��1���p�����S�C�����ֱ��\�Ӽ��������������X�Ͻ���ϡ�
��2���p�����S�C���˱۲��\�Ӽ���݆���ߴ硣
��3���p�ٻ��D�돽���ٰ��řCе�ք������r���ȿs����D�����Ȼ��D����s�����M�������^С��ǰ��λ�����M�л��D������
��4����ϵ�y���O�о��_�b�á�
���������Y
���S�C�����ֱ��OӋҪ�۲��\�ӵ�Ŀ�ģ����ֲ��͵����g�\�ӷ���������һ�c�������׃�ֲ����ˑB����λ�����t�������ɶȼ��Ԍ��F����ˣ�һ����f�۲���ԓ�߂�3�����ɶȲ��ܝM�����Ҫ���ֱ���s�����һ��D���������\�ӡ��ֱ۵ĸ��N�\��ͨ�����әC�����N���әC���팍�F���ı۲���������r���������ڹ����м�ֱ�ӳ������ֲ����������o�����d�ɣ����������\���^�ࡣ
��ˣ����ĽY���������������`���Ե�ֱ��Ӱ푵��Cе�ֵĹ������ܡ�

















 ��վ֩���ģ�壺
������|
�̽���|
�ݳ���|
�����첼��|
��Ϫ��|
������|
���|
����|
���|
������|
������|
�Ͽ���|
������|
������|
������|
������|
��Ϫ��|
��ͤ��|
������|
��������|
������|
�˹���|
������|
��ɽ��|
��������|
������|
������|
��������|
���������|
������|
۶����|
������|
۶����|
��������|
������|
Ԫ��|
Ī��|
̨����|
������|
������|
������|
��վ֩���ģ�壺
������|
�̽���|
�ݳ���|
�����첼��|
��Ϫ��|
������|
���|
����|
���|
������|
������|
�Ͽ���|
������|
������|
������|
������|
��Ϫ��|
��ͤ��|
������|
��������|
������|
�˹���|
������|
��ɽ��|
��������|
������|
������|
��������|
���������|
������|
۶����|
������|
۶����|
��������|
������|
Ԫ��|
Ī��|
̨����|
������|
������|
������|
